An oscillation is damped when the amplitude and mechanical energy of a system gradually decreases to zero as a result of dissipative forces.(air resistance, friction, internal forces)
Amplitude and frequency will be reduced during damping.
Damping is the process whereby energy is taken from the oscillating system.
When there is damping, amplitude decrease and period increase.
Types of Damping
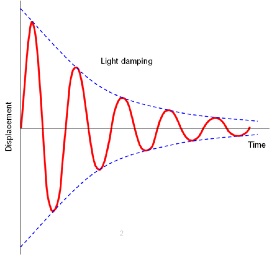
1. Light damping
- Defined oscillations are observed, but the amplitude of oscillation is reduced gradually with time.
2. Critical Damping
- The system returns to its equilibrium position in the shortest possible time without any oscillation.
3. Heavy Damping
- The system returns to the equilibrium position very slowly, without any oscillation. Heavy damping occurs when the resistive forces exceed those of critical damping.
Critical Damping is important so as to prevent a large number of oscillations and there being too long a time when the system cannot respond to further disturbances.
- Instruments such as balances and electrical meters are critically damped so that the pointer moves quickly to the correct position without oscillating.
- The shock absorbers on a car critically damp the suspension of the vehicle and so resist the setting up of vibration wich could make control difficult or cause damage.